To provide a tangible showcase of my work, how I implement my skills, and my approach from concept to execution, I’ve included a portfolio of my most recent projects. Take a moment to explore below, and reach out if you’re interested in learning more about what I have to offer.
Soft Robotic Walker
Engineering Lead
As part of a team, created a soft robotic walker for a challenge. Designed, simulated and manufactured two separate concepts that competed. 3D CAD software, real-time simulation software and 3D printing were utilized. The first concept achieved a velocity of 1 cm/sec while the second 2.5 cm/sec and amphibious operation.
Difficulty










LightPulse
Project Lead / Community Member
As a member of ETH's Student Project House, developing an application for obstacle detection and avoidance for visually impaired people using the LIDAR sensors available in all newer smartphone models. The app is still on the initial stages but can detect obstacles in a radius of 5 m in front of the user. Simultaneously, I have conducted several interviews with users to receive feedback and additional features suggestions.
Difficulty

Asymmetric Gear Design Software
Researcher
Developed a program that facilitates the geometrical design of asymmetric involute gear tooth profiles based on modified conventional gear theory. Published a conference paper along with the development of proprietary software. Conducted Static and Transient Structural study for the determination of the asymmetric gears’ mechanical characteristics in comparison to conventional.
Difficulty






Engineering Lead / Project Lead
For NASA's Space App Challenge, I lead a team and engineered a mechanical memory storing and accessing solution. The design was based on a bendable metal shell to represent a "mech" bit. The assembly could withstand temperatures above 500 degrees Celsius and had a capacity of 1 MB as per specifications. The solution was later presented to a panel of judges.
Difficulty



Femur Bone FEA
Researcher
Analyzed various cases on the top joint of a human femur bone. Created two separate femur geometry models based on ct scans- simplified model with only cortical bone and complete model with cortical and trabecular bone - and compared the results. Tested multiple load cases - standing, jumping, running. Modeled the case of partial fracture on the base of the joint. Documented and analyzed the results for further studies.
Difficulty





Vehicle Gearbox
Designer
As a member of the Machine Design Lab of NTUA, disassembled, measured and replicated using CAD software a functional truck gearbox. Some parts required 3D scanning while during the reassembly, maintenance was performed on the gearbox. The 3D model was used for educational purposes in the lab's courses.
Difficulty



Squashy - Multimodal Soft Robot
Researcher / Author
Developed a locomotion system for a multi-modal drone capable of withstanding impacts and navigating both aerial and terrestrial environments. Using both simulations and experiments the system was designed with a deformable outer ring and utilises two-anchor crawling to locomote. An operational prototype validated the robots ability to traverse gaps of minimum 20% of the nominal diameter suspended in the air.
Project Report : A Terrestrial Locomotion Strategy for Soft, Multimodal Aerial Robots
Difficulty






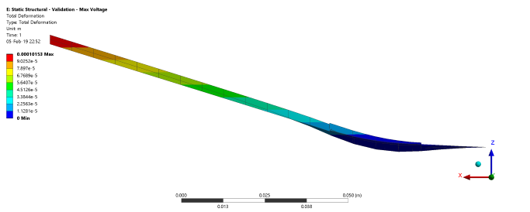
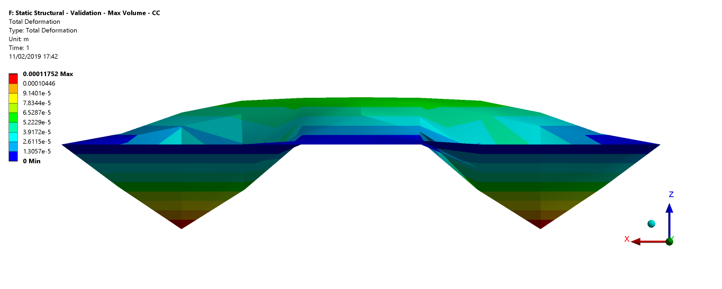
Active vibration control of composite structures using piezoelectric patches
Researcher / Author
Established a methodology for modelling composite structures with the help of a commercial finite element package (ANSYS) and applying active damping control (MATLAB, Simulink) using piezoelectric patches. With this technology it will be possible to change the shape of any mechanical construction to alter its behaviour and response to its environment. This cutting-edge technology, once properly implemented, will revolutionize many industries and areas of research.
Thesis Report: Active vibration control of composite structures using piezoelectric patches
Difficulty








An Ingestible Stackable Capsule System for Gastrointestinal Applications
Researcher / Co-Author
For my ETH Zurich master's thesis at the GI Lab of MIT – HMS under Professor G. Traverso, I developed an ingestible electronic capsule for long-term cardiovascular and respiratory monitoring. Addressing limitations of current monitoring devices, this capsule offers accurate measurements (comparable to ECG), extended recording (minimum 2 weeks), and patient-friendly delivery and residence. The capsule, sized to FDA-approved dimensions, includes a microcontroller (nRF52832), electronic components, and a microphone. Initial evaluations assessed microphone performance and energy consumption. The flexible PCB circuit was laser-cut and components soldered, optimizing the capsule design for soundwave concentration. In vivo experiments with swine subjects validated audio and ECG signal similarity, with methods like dynamic time wrapping (DTW) confirming over 95% similarity. Machine learning models trained with cardiac signal databases accurately detected heartbeat rates within 3% error using Wavelet Decomposition, Autoregressive Models, PCA, and SVMs. Breathing rate detection showed a 10% error due to limited data and stomach detection challenges. This research serves as a foundation for designing future long-term vital sign sensors, aiding in large-scale medical data collection, rapid diagnosis, and closed-loop treatments. Potential applications include chronic cardiovascular conditions patients, first responders, athletes, seniors, and burn victims.
Thesis Report: An Ingestible Gastric Resident System for Cardiovascular Monitoring
Difficulty



















Separable Dissolvable Microneedle Array Patch
Researcher
At the GI Lab (MIT – HMS), I've contributed to a 7-month project developing microneedle patches for long-term drug delivery. These microneedles, targeting the sub-stratum corneum layer, offer non-invasive drug delivery without nerve stimulation. Our innovation focuses on scaled fabrication of separable, dissolvable microneedles that detach and dissolve over time for controlled release. The project integrates material science, micro- and nano-fabrication techniques, and unconventional manufacturing processes. It also involves measurement and inspection methods like stereomicroscopy, micro-CT, HPLC, and profilometry. Operating under tight deadlines, the project emphasises research organisation, resource management, and validated deliverables. Future steps include insertion testing, pharmacokinetic studies, and human trials. Our novel manufacturing approach aims to commercialise these microneedles, revolutionising the pharmaceutical industry.
Difficulty



An Ingestible Gastric Resident System for Cardiovascular Monitoring
Researcher / Author
For my ETH Zurich master's thesis at the GI Lab of MIT – HMS under Professor G. Traverso, I developed an ingestible electronic capsule for long-term cardiovascular and respiratory monitoring. Addressing limitations of current monitoring devices, this capsule offers accurate measurements (comparable to ECG), extended recording (minimum 2 weeks), and patient-friendly delivery and residence. The capsule, sized to FDA-approved dimensions, includes a microcontroller (nRF52832), electronic components, and a microphone. Initial evaluations assessed microphone performance and energy consumption. The flexible PCB circuit was laser-cut and components soldered, optimising the capsule design for soundwave concentration. In vivo experiments with swine subjects validated audio and ECG signal similarity, with methods like dynamic time wrapping (DTW) confirming over 95% similarity. Machine learning models trained with cardiac signal databases accurately detected heartbeat rates within 3% error using Wavelet Decomposition, Autoregressive Models, PCA, and SVMs. Breathing rate detection showed a 10% error due to limited data and stomach detection challenges. This research serves as a foundation for designing future long-term vital sign sensors, aiding in large-scale medical data collection, rapid diagnosis, and closed-loop treatments. Potential applications include chronic cardiovascular conditions patients, first responders, athletes, seniors, and burn victims.
Thesis Report: An Ingestible Gastric Resident System for Cardiovascular Monitoring
Difficulty













An Implantable Robotic First Responder for Automatic Recovery of Opioid Overdose
Researcher / Co-author
In the GI Lab at MIT – HMS, I contributed to the development of an implantable opioid detection and reversal robot to address existing system limitations such as poor user adherence, algorithm decision-making issues, and slow treatment release. My focus was on designing the ultra-rapid pump and valve assembly. Utilising CAD, kinematic studies, and FEA, I designed a drug delivery system capable of dispensing 1 mL of solution within 10 seconds, with a capacity for 3 delivery events and refillability without device retrieval. This robotic first responder continuously monitors vital signs, alerts users of potential overdose, and administers reversal treatment within an average of 4 minutes, significantly faster than existing systems. Validation was conducted in vitro and in vivo with 25 swine models, demonstrating successful performance. This innovative approach offers potential solutions to mitigate opioid overdose as a public health crisis. A co-authored journal paper detailing this research is in the publication process.
Journal Paper: An Implantable Robotic First Responder for Automatic Recovery of Opioid Overdose
Difficulty




Squashy - Multimodal Soft Robot
Researcher / Author
In the Environmental Robotics Lab at ETH Zurich under Professor S. Mintchev, I developed the terrestrial locomotion method for a soft multimodal aerial drone for my semester project. Addressing the vulnerability of aerial drones to impact, I designed a deformable outer frame for impact resistance and adaptive morphology for traversing gaps. Locomotion and actuation methods were selected using evaluation matrices based on criteria like ease of control, energy consumption, and speed. The chosen bioinspired crawling method utilised linear actuators controlled by an STM32 microcontroller and custom software. Simulations using SOFA software validated the design, and the drone featured a laser-cut soft acrylic shell with 3D printed parts and an external anisotropic friction material for crawling. Testing included various gap traversal scenarios. Notably, the robot demonstrated the ability to traverse gaps of minimum 20% of the nominal diameter suspended in the air.
Project Report : A Terrestrial Locomotion Strategy for Soft, Multimodal Aerial Robots
Difficulty
Active vibration control of composite structures using piezoelectric patches
Researcher / Author
For my NTUA diploma thesis at the Control Systems Lab under Professor E. Papadopoulos, I developed a model-based control algorithm for active vibration damping in composite structures using piezoelectric patches. Motivated by aerospace debris impact, this research aimed to reduce damage and vibration fatigue in lightweight composite materials. I modeled beam and plate structures using distributed finite elements and calculated dynamic matrices (M, K, C) using Fourier transformation and eigenvectors. An LQR control scheme was implemented for robust and efficient damping, utilising piezoelectric elements as both actuators (PZT) and sensors (PVDF). Numerical and experimental validations confirmed the model's accuracy and control system effectiveness. Impact types were categorised based on momentum, and FE model parameters were fine-tuned. Experimental validation included an 80/20 frame with controllable impactor for real-time control. Future research aims to expand the model to other structures and incorporate machine learning for impact detection and material stress assessment. Potential applications range from automotive and aeronautical industries to sports gear, energy harvesting, and biomedical devices.
Thesis Report: Active vibration control of composite structures using piezoelectric patches
Difficulty
Slinky - Soft Robotic Walker
Engineering Lead
At ETH Zurich, I contributed to the design, fabrication, and testing of a pneumatically actuated robotic walker for the Soft & Biohybrid Robotics course under Professor R. Katzschmann. In a team of four, I led the design and simulation phase, drawing inspiration from the "Slinky" toy for a soft robot with multiple pneumatic chambers. This design allowed the robot to oscillate and move forward by inflating and deflating compartments, while pneumatic suction cups ensured ground attachment. Using CAD tools and the SOFA soft continuum FEA software, I fine-tuned various parameters using custom routines in Python and C. Prototyping involved 3D printing molds and casting with silicone. The robot ranked 6th for speed and 1st for creative design and simulation accuracy in class testing. Additionally, I developed a caterpillar-like robot with passive morphing legs, achieving a 150% speed improvement over the initial design.
Difficulty
LightPulse
Project Lead / Community Member
At ETH Zurich's Student Project House (SPH), I led the LightPulse project aimed at creating an affordable, integrated solution to assist visually impaired individuals. LightPulse utilises smartphones' cameras and LIDAR sensors to detect obstacles within an 8m range and provide real-time feedback through haptic and auditory signals. The software operates effectively under various lighting conditions and minimises battery consumption. After a 3-month development phase, we expanded the team and conducted alpha testing with 10 volunteers at SPH. We also received positive feedback from organisations like the Swiss Organisation for Visually Impaired People and the Greek Blind Association, as well as individual visually impaired users, aiding in further refinement. Future plans for LightPulse include advanced obstacle recognition, device-to-device communication for enhanced navigation, and potential integration into smartphone operating systems.
Difficulty
Asymmetric Involute Gear Profile Generation
Researcher / Co-author
In Professor V. Spitas’s Machine Design Lab at NTUA, I developed a proprietary algorithm for asymmetric gear design to optimise load distribution and reduce gear size. The algorithm, tailored to user-defined parameters like involute angle and pitch diameter, generated 2D gear profiles using mathematical equations and cubic splines interpolation. I validated this design through computational testing of 50 gear pairs, assessing contact area, stress distribution, and friction force. This research earned the Thomaeidion Award and led to a published conference paper. Additionally, a CAD software company integrated our algorithm into their standard toolbox. In a subsequent project, I enhanced gear meshing simulations by incorporating solid-fluid interactions between gear teeth and lubricants. This novel computational approach, essential for accurate load transfer and heat dissipation, was presented in a Machine Elements II lecture.
Difficulty
Engineering Lead / Project Lead
During NASA's 2019 Space App challenge, my team and I tackled the design of a mechanical memory storage for a Venus-roaming robot powered by wind. The device needed to endure Venus's acidic 500°C environment, store 2 MB, and be rewritable/readable. I led a three-person team, focusing on device ideation and design. We developed two main concepts: a loom-based device using metal-fibre cloth to represent "0" and "1" bits, offering high memory density but not rewritability; and "MechBits," bendable shells with changing curvature to signify bits, placed on a drum-driven system. Utilising microfabrication and stainless steel, "MechBits" met all requirements and ranked 2nd in the competition.
Difficulty
Femur Bone FEA
Researcher
During my Biomechanics & Biomedical Engineering course at NTUA with Professor L. Alexopoulos, I led a project simulating various loading conditions on a femur bone. I processed femur MRI data using generative adversarial networks to segment and classify bone structures (cancellous and compact tissue), then generated a point mesh model for simulation. Material properties were researched for accuracy, and load cases included static loading, jumping, and intertrochanteric fracture scenarios. Applying boundary conditions and forces typical for an average male, I used FEA to simulate these cases. Findings were cross-validated with existing data and presented in a lecture, marking my initial foray into biomedical engineering and enhancing my FEA and image classification skills.
Difficulty
Vehicle Gearbox
Designer
As a member of the Machine Design Lab of NTUA, disassembled, measured and replicated using CAD software a functional truck gearbox. Some parts required 3D scanning while during the reassembly, maintenance was performed on the gearbox. The 3D model was used for educational purposes in the lab's courses.
Difficulty




Separable Dissolvable Microneedle Array Patch
Researcher
At the GI Lab (MIT – HMS), I've contributed to a 7-month project developing microneedle patches for long-term drug delivery. These microneedles, targeting the sub-stratum corneum layer, offer non-invasive drug delivery without nerve stimulation. Our innovation focuses on scaled fabrication of separable, dissolvable microneedles that detach and dissolve over time for controlled release. The project integrates material science, micro- and nano-fabrication techniques, and unconventional manufacturing processes. It also involves measurement and inspection methods like stereomicroscopy, micro-CT, HPLC, and profilometry. Operating under tight deadlines, the project emphasises research organisation, resource management, and validated deliverables. Future steps include insertion testing, pharmacokinetic studies, and human trials. Our novel manufacturing approach aims to commercialise these microneedles, revolutionising the pharmaceutical industry.
Difficulty
An Ingestible Gastric Resident System for Cardiovascular Monitoring
Researcher / Author
For my ETH Zurich master's thesis at the GI Lab of MIT – HMS under Professor G. Traverso, I developed an ingestible electronic capsule for long-term cardiovascular and respiratory monitoring. Addressing limitations of current monitoring devices, this capsule offers accurate measurements (comparable to ECG), extended recording (minimum 2 weeks), and patient-friendly delivery and residence. The capsule, sized to FDA-approved dimensions, includes a microcontroller (nRF52832), electronic components, and a microphone. Initial evaluations assessed microphone performance and energy consumption. The flexible PCB circuit was laser-cut and components soldered, optimising the capsule design for soundwave concentration. In vivo experiments with swine subjects validated audio and ECG signal similarity, with methods like dynamic time wrapping (DTW) confirming over 95% similarity. Machine learning models trained with cardiac signal databases accurately detected heartbeat rates within 3% error using Wavelet Decomposition, Autoregressive Models, PCA, and SVMs. Breathing rate detection showed a 10% error due to limited data and stomach detection challenges. This research serves as a foundation for designing future long-term vital sign sensors, aiding in large-scale medical data collection, rapid diagnosis, and closed-loop treatments. Potential applications include chronic cardiovascular conditions patients, first responders, athletes, seniors, and burn victims.
Thesis Report: An Ingestible Gastric Resident System for Cardiovascular Monitoring
Difficulty
An Ingestible Stackable Capsule System for Gastrointestinal Applications
Researcher / Co-Author
For my ETH Zurich master's thesis at the GI Lab of MIT – HMS under Professor G. Traverso, I developed an ingestible electronic capsule for long-term cardiovascular and respiratory monitoring. Addressing limitations of current monitoring devices, this capsule offers accurate measurements (comparable to ECG), extended recording (minimum 2 weeks), and patient-friendly delivery and residence. The capsule, sized to FDA-approved dimensions, includes a microcontroller (nRF52832), electronic components, and a microphone. Initial evaluations assessed microphone performance and energy consumption. The flexible PCB circuit was laser-cut and components soldered, optimizing the capsule design for soundwave concentration. In vivo experiments with swine subjects validated audio and ECG signal similarity, with methods like dynamic time wrapping (DTW) confirming over 95% similarity. Machine learning models trained with cardiac signal databases accurately detected heartbeat rates within 3% error using Wavelet Decomposition, Autoregressive Models, PCA, and SVMs. Breathing rate detection showed a 10% error due to limited data and stomach detection challenges. This research serves as a foundation for designing future long-term vital sign sensors, aiding in large-scale medical data collection, rapid diagnosis, and closed-loop treatments. Potential applications include chronic cardiovascular conditions patients, first responders, athletes, seniors, and burn victims.
Thesis Report: An Ingestible Gastric Resident System for Cardiovascular Monitoring
Difficulty
Active vibration control of composite structures using piezoelectric patches
Researcher / Author
For my NTUA diploma thesis at the Control Systems Lab under Professor E. Papadopoulos, I developed a model-based control algorithm for active vibration damping in composite structures using piezoelectric patches. Motivated by aerospace debris impact, this research aimed to reduce damage and vibration fatigue in lightweight composite materials. I modeled beam and plate structures using distributed finite elements and calculated dynamic matrices (M, K, C) using Fourier transformation and eigenvectors. An LQR control scheme was implemented for robust and efficient damping, utilising piezoelectric elements as both actuators (PZT) and sensors (PVDF). Numerical and experimental validations confirmed the model's accuracy and control system effectiveness. Impact types were categorised based on momentum, and FE model parameters were fine-tuned. Experimental validation included an 80/20 frame with controllable impactor for real-time control. Future research aims to expand the model to other structures and incorporate machine learning for impact detection and material stress assessment. Potential applications range from automotive and aeronautical industries to sports gear, energy harvesting, and biomedical devices.
Thesis Report: Active vibration control of composite structures using piezoelectric patches
Difficulty
An Implantable Robotic First Responder for Automatic Recovery of Opioid Overdose
Researcher / Co-author
In the GI Lab at MIT – HMS, I contributed to the development of an implantable opioid detection and reversal robot to address existing system limitations such as poor user adherence, algorithm decision-making issues, and slow treatment release. My focus was on designing the ultra-rapid pump and valve assembly. Utilising CAD, kinematic studies, and FEA, I designed a drug delivery system capable of dispensing 1 mL of solution within 10 seconds, with a capacity for 3 delivery events and refillability without device retrieval. This robotic first responder continuously monitors vital signs, alerts users of potential overdose, and administers reversal treatment within an average of 4 minutes, significantly faster than existing systems. Validation was conducted in vitro and in vivo with 25 swine models, demonstrating successful performance. This innovative approach offers potential solutions to mitigate opioid overdose as a public health crisis. A co-authored journal paper detailing this research is in the publication process.
Journal Paper: An Implantable Robotic First Responder for Automatic Recovery of Opioid Overdose
Difficulty
Squashy - Multimodal Soft Robot
Researcher / Author
In the Environmental Robotics Lab at ETH Zurich under Professor S. Mintchev, I developed the terrestrial locomotion method for a soft multimodal aerial drone for my semester project. Addressing the vulnerability of aerial drones to impact, I designed a deformable outer frame for impact resistance and adaptive morphology for traversing gaps. Locomotion and actuation methods were selected using evaluation matrices based on criteria like ease of control, energy consumption, and speed. The chosen bioinspired crawling method utilised linear actuators controlled by an STM32 microcontroller and custom software. Simulations using SOFA software validated the design, and the drone featured a laser-cut soft acrylic shell with 3D printed parts and an external anisotropic friction material for crawling. Testing included various gap traversal scenarios. Notably, the robot demonstrated the ability to traverse gaps of minimum 20% of the nominal diameter suspended in the air.
Project Report : A Terrestrial Locomotion Strategy for Soft, Multimodal Aerial Robots
Difficulty
Slinky - Soft Robotic Walker
Engineering Lead
At ETH Zurich, I contributed to the design, fabrication, and testing of a pneumatically actuated robotic walker for the Soft & Biohybrid Robotics course under Professor R. Katzschmann. In a team of four, I led the design and simulation phase, drawing inspiration from the "Slinky" toy for a soft robot with multiple pneumatic chambers. This design allowed the robot to oscillate and move forward by inflating and deflating compartments, while pneumatic suction cups ensured ground attachment. Using CAD tools and the SOFA soft continuum FEA software, I fine-tuned various parameters using custom routines in Python and C. Prototyping involved 3D printing molds and casting with silicone. The robot ranked 6th for speed and 1st for creative design and simulation accuracy in class testing. Additionally, I developed a caterpillar-like robot with passive morphing legs, achieving a 150% speed improvement over the initial design.
Difficulty
LightPulse
Project Lead / Community Member
At ETH Zurich's Student Project House (SPH), I led the LightPulse project aimed at creating an affordable, integrated solution to assist visually impaired individuals. LightPulse utilises smartphones' cameras and LIDAR sensors to detect obstacles within an 8m range and provide real-time feedback through haptic and auditory signals. The software operates effectively under various lighting conditions and minimises battery consumption. After a 3-month development phase, we expanded the team and conducted alpha testing with 10 volunteers at SPH. We also received positive feedback from organisations like the Swiss Organisation for Visually Impaired People and the Greek Blind Association, as well as individual visually impaired users, aiding in further refinement. Future plans for LightPulse include advanced obstacle recognition, device-to-device communication for enhanced navigation, and potential integration into smartphone operating systems.
Difficulty
Asymmetric Involute Gear Profile Generation
Researcher / Co-author
In Professor V. Spitas’s Machine Design Lab at NTUA, I developed a proprietary algorithm for asymmetric gear design to optimise load distribution and reduce gear size. The algorithm, tailored to user-defined parameters like involute angle and pitch diameter, generated 2D gear profiles using mathematical equations and cubic splines interpolation. I validated this design through computational testing of 50 gear pairs, assessing contact area, stress distribution, and friction force. This research earned the Thomaeidion Award and led to a published conference paper. Additionally, a CAD software company integrated our algorithm into their standard toolbox. In a subsequent project, I enhanced gear meshing simulations by incorporating solid-fluid interactions between gear teeth and lubricants. This novel computational approach, essential for accurate load transfer and heat dissipation, was presented in a Machine Elements II lecture.
Difficulty
Engineering Lead / Project Lead
During NASA's 2019 Space App challenge, my team and I tackled the design of a mechanical memory storage for a Venus-roaming robot powered by wind. The device needed to endure Venus's acidic 500°C environment, store 2 MB, and be rewritable/readable. I led a three-person team, focusing on device ideation and design. We developed two main concepts: a loom-based device using metal-fibre cloth to represent "0" and "1" bits, offering high memory density but not rewritability; and "MechBits," bendable shells with changing curvature to signify bits, placed on a drum-driven system. Utilising microfabrication and stainless steel, "MechBits" met all requirements and ranked 2nd in the competition.
Difficulty
Femur Bone FEA
Researcher
During my Biomechanics & Biomedical Engineering course at NTUA with Professor L. Alexopoulos, I led a project simulating various loading conditions on a femur bone. I processed femur MRI data using generative adversarial networks to segment and classify bone structures (cancellous and compact tissue), then generated a point mesh model for simulation. Material properties were researched for accuracy, and load cases included static loading, jumping, and intertrochanteric fracture scenarios. Applying boundary conditions and forces typical for an average male, I used FEA to simulate these cases. Findings were cross-validated with existing data and presented in a lecture, marking my initial foray into biomedical engineering and enhancing my FEA and image classification skills.
Difficulty
Vehicle Gearbox
Designer
As a member of the Machine Design Lab of NTUA, disassembled, measured and replicated using CAD software a functional truck gearbox. Some parts required 3D scanning while during the reassembly, maintenance was performed on the gearbox. The 3D model was used for educational purposes in the lab's courses.
Difficulty
To provide a tangible showcase of my work, how I implement my skills, and my approach from concept to execution, I’ve included a portfolio of my most recent projects. Take a moment to explore below, and reach out if you’re interested in learning more about what I have to offer.